|
Austria
Offline
|
| |
|
2019-6-13
|
|
United States
Offline
|
| |
|
2019-6-14
|
|
Flight distance : 128054 ft
United States
Offline
|
| |
|
2019-6-14
|
|
Austria
Offline
|
| |
|
2019-6-17
|
|
United States
Offline
|
| |
|
2019-7-7
|
|
Germany
Offline
|
| |
|
2019-7-8
|
|
Austria
Offline
|
| |
|
2019-7-12
|
|
China
Offline
|
| |
|
2019-7-14
|
|
United States
Offline
|
| |
|
2019-7-30
|
|
China
Offline
|
| |
|
2019-8-1
|
|
United States
Offline
|
| |
|
2019-8-1
|
|
Flight distance : 210226 ft
United States
Offline
|
| |
|
2019-8-1
|
|
United States
Offline
|
| |
|
2019-8-2
|
|
United States
Offline
|
| |
|
2019-8-17
|
|
United States
Offline
|
| |
|
2019-8-17
|
|
Canada
Offline
|
| |
|
2019-8-17
|
|
Flight distance : 210226 ft
United States
Offline
|
| |
|
2019-8-19
|
|
China
Offline
|
| |
|
2019-8-25
|
|
Flight distance : 622234 ft
United States
Offline
|
| |
|
2019-8-28
|
|
Flight distance : 210226 ft
United States
Offline
|
| |
|
2019-8-29
|
|
Canada
Offline
|
| |
|
2019-8-29
|
|
United States
Offline
|
| |
|
2019-8-29
|
|
Flight distance : 622234 ft
United States
Offline
|
| |
|
2019-8-31
|
| ||
|
2019-8-31
|
|
Flight distance : 622234 ft
United States
Offline
|
| |
|
2019-8-31
|
|
Flight distance : 622234 ft
United States
Offline
|
| |
|
2019-9-1
|
|
Flight distance : 622234 ft
United States
Offline
|
| |
|
2019-9-1
|
|
United States
Offline
|
|
|
2019-9-2
|
|
United States
Offline
|
| |
|
2019-9-2
|
|
Flight distance : 622234 ft
United States
Offline
|
| |
|
2019-9-2
|
|
United States
Offline
|
| |
|
2019-9-2
|
|
Flight distance : 622234 ft
Offline
|
| |
|
2019-9-2
|
|
United Kingdom
Offline
|
| |
|
2020-6-9
|





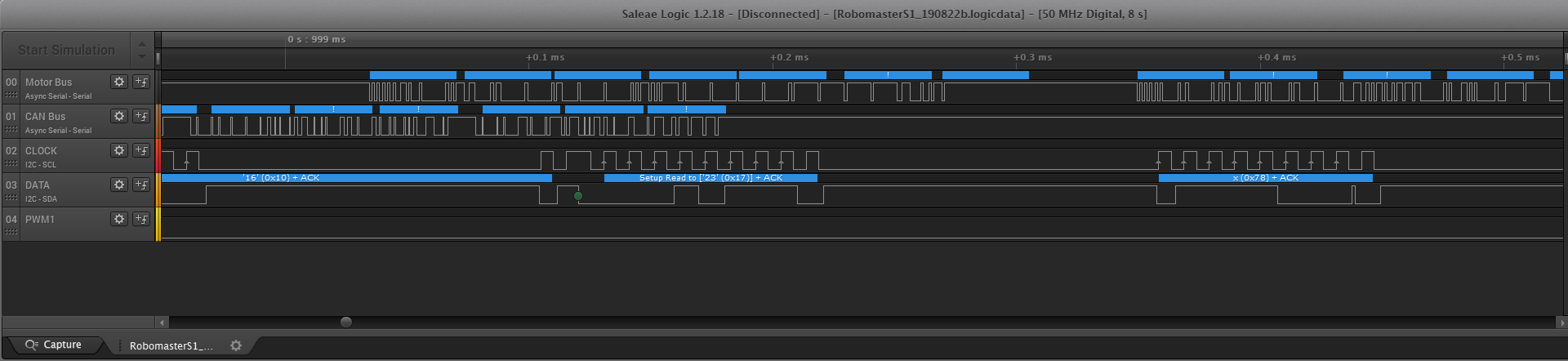
 , it can trigger robomaster shoot. but as @sevreNniarB said, caputure and analysis these packets will cost a lot of time.
, it can trigger robomaster shoot. but as @sevreNniarB said, caputure and analysis these packets will cost a lot of time.